Two Ways Data Science is Changing the Future of the Weight Room
Sports tech has been focused primarily on lagging indicators for years. The relative lack of leading indicators has many reasons, and not least among...
Implementing autoregulated principles on a team scale isn’t trivial. At the surface the problem is relatively approachable, with simple tools like APRE templates, 1RM calculators, or VBT devices a coach can prescribe a relatively simple program to a team and athletes can start regulating their training loads without any specific preparation. The caveat in the above methods is in the philosophy.
Autoregulation taken to its logical conclusion is simple to describe. The coach always knows the athlete’s current strength level, and the training stimulus is reflective of that information. Hidden in that simple phrase is something deviously complex:
It is impossible to imagine a future technology that will enable the coach to not only perfectly assess the athletes' strength level but also do so at all times. This is reminiscent of my days as a Control Systems Engineer for Pratt & Whitney, where we would attempt to do the same with something many orders of magnitude less complex than a human athlete, a jet engine.
To build a system that can optimally control a jet engine we try to do the same thing as a strength coach, we assess the engines current state and make adjustments in anticipation or in reaction to an external stimulus, and measure the results. Control theory was developed in the 19th century to aid in the design of new industrial mechanisms, and over the years it’s gotten quite good at solving these kinds of problems.
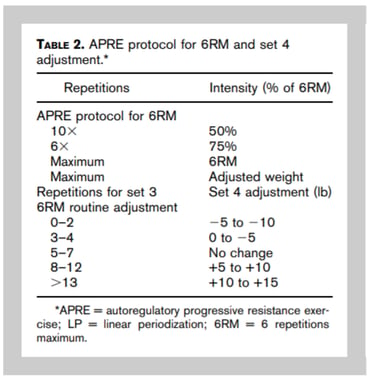
 The athlete-coach feedback loop
The athlete-coach feedback loopThis image represents the athlete-coach feedback loop in an autoregulated, individualized training program. The coach begins with a preconceived notion of the athletes strength, and on the first set has no choice but to use that old data to make the first training decision, since no input has given the coach any opportunity to take a ‘measurement’. The coach employs whichever autoregulation method of choice to choose the training load, the athlete responds, and the coach makes their first assessment. Usually, since the athlete starts at lighter weights, it’s to go up in weight.
As the workout progresses and these micro-decisions get made, the coach with the help of their ‘Controller’ eventually arrives at the days training weight.
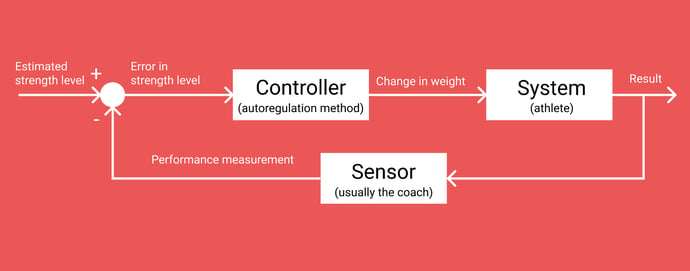
 The signal response for a PID controller
The signal response for a PID controllerThe above signal response graph demonstrates our issue. The blue line is our athlete, and zero is the athletes estimated level of strength. This graph is showing what’s called a ‘step function’, or an immediate increase in our athletes strength level, which is suitable to model a change in strength between two training sessions.
The black, green, and red lines are different autoregulatory methods (Controllers) responding to this perceived immediate increase in athlete strength level, each automatically adjusting to give the athlete training loads appropriate to this new strength.
Each approach has its drawbacks. The black method overshoots too far, potentially putting a load on the bar that’s too heavy even for your stronger-than-yesterday athlete. The red method undershoots, and the athlete only does one set in the ‘ideal’ range at the end of the workout. The green line is the closest of the three, oscillating around our ideal training load, sometimes over and under-shooting but within a reasonable amount.
Our elusive perfect solution would essentially mirror the athlete, with the ‘Result’ layered directly on top of the blue athlete line. The number one reason this will never happen, is time. It’s the reason Segways fall over, self-driving cars inevitably kill people, or even why you tripped on that step that you knew was there. The sensors we use to process data (our eyes) and the processors we use to interpret this data (our brains) have some sort of inevitable time delay, or delta, between the real world and our actions.
 RepOne ‘Controllers’ continuously updating in the background
RepOne ‘Controllers’ continuously updating in the backgroundFrom the point of view of our athlete-coach feedback loop we have an inability to sense the athlete’s strength between sessions, during off days, or even between sets, so our actions are always late. That doesn’t mean we can’t do something about it. A system like RepOne, with tight integration between sensors and software, can create these ‘Controllers’ in the background, feeding updated data back into our control loop as it comes in.
At this stage, our challenge is in developing better controllers and sensors. The RepOne device, with its unmatched 3D sensing and linear accuracy is as good as sensing gets at the moment. When fed into the RepOne Athlete App we can keep the time delta low, recording data on each set and integrating it into our data models. OpenBarbell has given us a great head start, with about a million data points we can use to develop our approaches, and we’re looking forward to the wealth of data we’ll have access to when RepOne ships next year.

Sports tech has been focused primarily on lagging indicators for years. The relative lack of leading indicators has many reasons, and not least among...
Strength coaching without data is like navigating your living room in the dark. Coaches and trainers know that they’re surrounded by the information...
Learn about Velocity Based Training and how it can aid in precision within a training cycle. This guide covers what VBT is, why we use it,...